
I am a Ph.D. student at Purdue University, where I conduct research on humanoid robot manipulation, vision-language-action (VLA) models, and world models within the Department of Computer and Information Technology (CIT).
I got my Master degree at the Shenzhen Key Laboratory of Robotic Perception and Intelligence, under the direction of Prof. Max Q.-H. Meng, at the Southern University of Science and Technology.
My research interests lie in robotic manipulation, embodied AI, computer vision, and robot learning. I am particularly interested in developing intelligent robotic systems that can understand, reason about, and interact with the physical world through vision, touch, and foundation models. My long-term goal is to build autonomous robots capable of robust manipulation in real-world environments.
- 2025.1: 🎉🎉 First author journal Paper published at IEEE Transactions on Automation Science and Engineering (T-ASE)
- 2023.12: 🎉🎉 Co-first author journal Paper published at IEEE Transactions on Cognitive and Developmental Systems (TCDS)
- 2023.7: 🎉🎉 Webpage released –>
📝 Projects
Learning to Predict Diverse Stable Placements for Extrinsic Manipulation on a Support Plane
Peng Xu, Zhiyuan Chen, Jiankun Wang and Max Q.-H. Meng
IEEE Transactions on Cognitive and Developmental Systems (TCDS), JCR Q2, IF=5.
[project] [paper] [dataset]
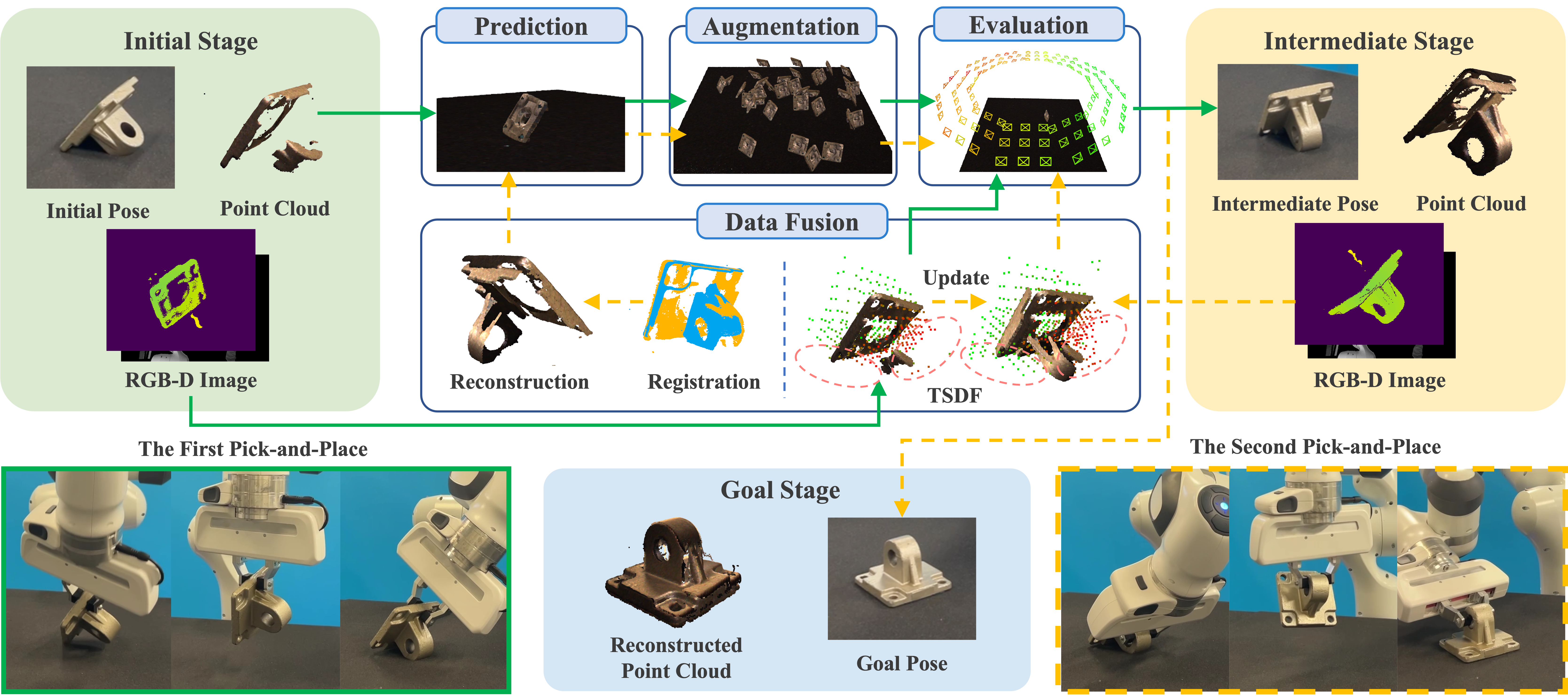
Closed-Loop Placement Planning for Regrasping and Reconstruction with Single-View RGB-D Images
Zhiyuan Chen, Jianshan Liu, Ronghao Chen and Jiankun Wang$^*$
IEEE Transactions on Automation Science and Engineering (T-ASE), JCR Q1, IF=5.9.
[paper]
📚 Publications
$\dagger$ indicates equal contribution, and $*$ indicates corresponding authorship.
Journals
- Closed-Loop Placement Planning for Regrasping and Reconstruction with Single-View RGB-D Images
Zhiyuan Chen, Jianshan Liu, Ronghao Chen and Jiankun Wang$^*$.
IEEE Transactions on Automation Science and Engineering (T-ASE), JCR Q1, IF=5.9.
[paper] - Learning to Predict Diverse Stable Placements for Extrinsic Manipulation on a Support Plane
Peng Xu$^\dagger$, Zhiyuan Chen$^\dagger$, Jiankun Wang and Max Q.-H. Meng$^*$.
IEEE Transactions on Cognitive and Developmental Systems (TCDS), JCR Q2, IF=5.
[project] [paper] [dataset]